Featured Projects
A selection of recent engineering projects spanning robotics, precision agriculture, and ML/DL systems.
HIRO Humanoid Robot System
Designed electronics and firmware for AHRS/IMU-based armbands and gloves for remotely controlling HIRO robot's multi-DOF arms and hands. Developed GUI application for calibration and testing. Created machine learning algorithms using synthesized motion data in Unity3D. Implemented Structured Text on PLC motion controller for harmonic drives and series elastic actuators.
6-DOF Robot Arm Control System
Comprehensive control system for custom 6-DOF robotic arm including desktop application (C#/Avalonia UI), Teensy 4.1 firmware with BASIC-like programming language interpreter, and custom electronics with KiCAD PCB design.
UAV Precision Spray System
Designed complete electronics, PCBs, firmware (ESP32, Arduino Nano), and Windows dashboard applications for precision agricultural spray system deployed on UAVs for intelligent crop management.
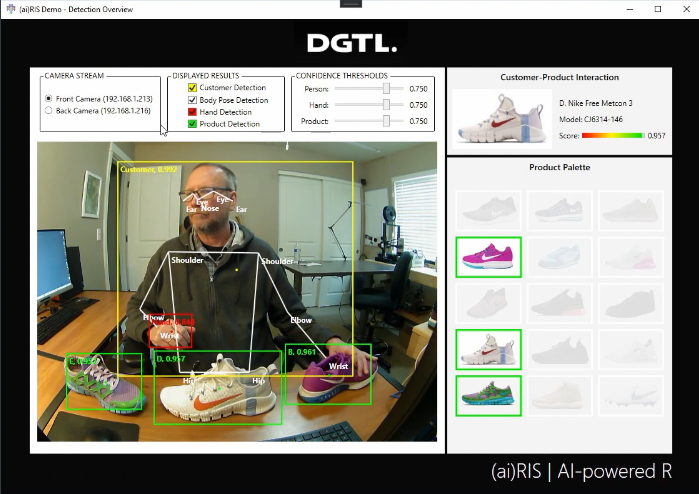
Deep Learning Product Detection System
Combined person detection, pose estimation, and custom object detection models for experiential retail applications using NVIDIA Inference and Real-time DNN Vision library on Jetson platform.
Eye-Hand Coordination Training for Stroke Survivors
Developed software application combining Leap Motion hand tracking and Tobii EyeX eye tracking technologies for testing and improving eye-hand coordination. Clinical study conducted and presented by Nikhil Choudhary at the 10th World Congress for Neurorehabilitation (WCNR) in Mumbai, India.

Multi-DOF Robotic Hand Development
Designed and prototyped advanced robotic hands with precision control systems. Developed custom electronics, firmware, and control algorithms for natural movement patterns. Integrated IMU-based wireless control with tactile feedback systems for intuitive robot manipulation.
Mine Haulage Truck IoT Architecture
Far-edge IoT architectural design and documentation for Anglo American's zero-emissions mine haulage truck solution, focusing on robust edge computing and real-time telemetry systems.
Human Sensing Using Electric Fields
Safety system using electric field sensing arrays to detect humans near autonomous vehicles and robots. Embedded sensor arrays on flexible substrates with signal amplification for proactive human detection and collision avoidance. Developed for NASA SBIR project and Swift Engineering. Patent awarded June 2019.